


















USBSSC32 路舵机控制是专为人形机器人、蜘蛛机器人、机械手等多舵机使用而量身定做的多路舵机控制器。 该控制器不但保留了原版的所有功能,还在原版的基础上作了升级,将原来的 RS232 串口改成了 USB 接口,方便电脑没有串口用户使用。控制器还增加了无线数传接口,兼容我们的蓝牙模块和 APC220无线数传,可实现无线远程控制。 USBSSC32 路舵机控制控制方式包括实时、定时、定速控制等,lynxmotion 的 RIOS Arm Control 和 SEQ 与 Visual Sequencer 等控制软件完全兼容。
USBSSC32 舵机控制板优点:
1、对于多舵机设备而言,确定每一个动作的各舵机转角参数实在是件不容易的事,有了配套的上位机舵机控制软件,通过“示教”的方法,调试、记录、下载一气呵成,使这一过程变得轻松方便;
2、舵机控制板上有一块存储器芯片,可以存储多组动作序列,这样上位计算机,发几条字符串命令,就可以让多舵机机器人做出复杂的动作套路,当然也可以通过字符串命令控制每个舵机的每个动作细节;
3、舵机控制板可以安装蓝牙模块或者APC220无线数传,这样可以让舵机控制板控制的机器人摆脱有线的束缚;
4、32路舵机控制板实际上可以看成一个输入输出接口板,它自己并没有程序思考能力,大家可能认为有点遗憾,但是把大脑交给远端的计算能力更强的PC机,不是不用担心Arduino UNO控制器可怜的CPU能力无以应付智能机器人“繁琐”的计算工作吗?或许您还可以利用PC机做些可视化的操作,所以这样的设计好像还蛮合理的;
5、舵机控制板不仅可以同时控制多达32路的伺服电机,可贵的是它还具有4个数字和模拟输入接口,可以接5V电压的传感器,这样就能实现带反馈的闭环控制,让多舵机设备,比如机器蜘蛛,可以根据周边环境变化,做出相应的动作反映。
32路舵机控制器与Arduino比较:
熟悉Arduino的人都知道Arduino有一个缺点就是I/O口较少,要想做个智能机器人,一两个舵机再加几个传感器是不行的,若想用Arduino控制十几个甚至二十几个舵机来做各种机器人的话,硬件资源就显得有些力不从心了,我发现32路舵机控制器很好的解决了这个问题,研究明白它与Arduino的通信,控制多个舵机也就变得简单多了。
首先来介绍一下这个32路舵机控制器,下面是该控制器的功能图解。
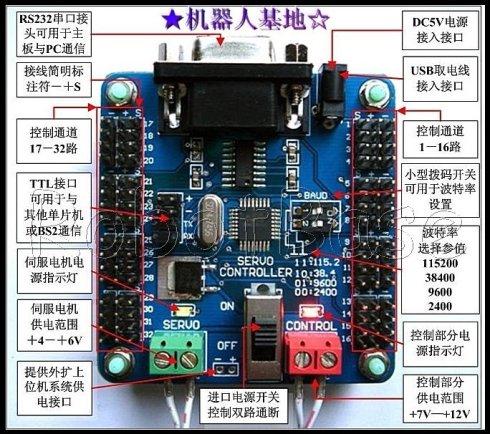
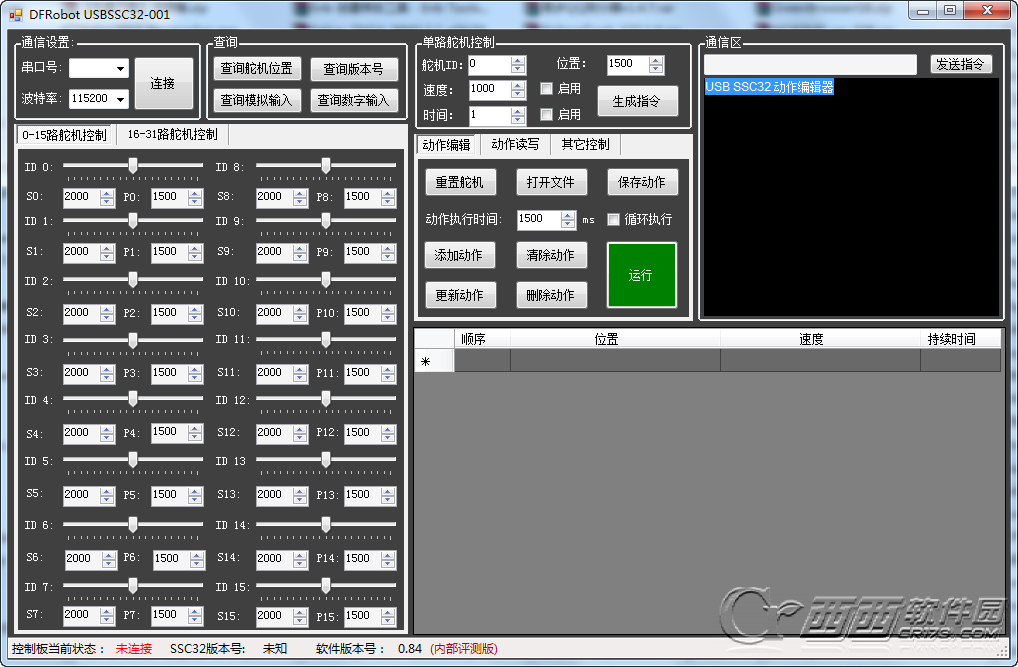
这个控制器使用起来还是蛮简单的,接上电源(这里要注意,伺服电机供电,绿端子要接入+4V到+6V电压,控制部分,红端子供电要接入+7V到+12V电压),红绿指示灯就会亮起,再插好舵机,若单独使用控制器的话,可以用PC机做上位机通过自带的调试软件控制舵机转动角度以及速度。
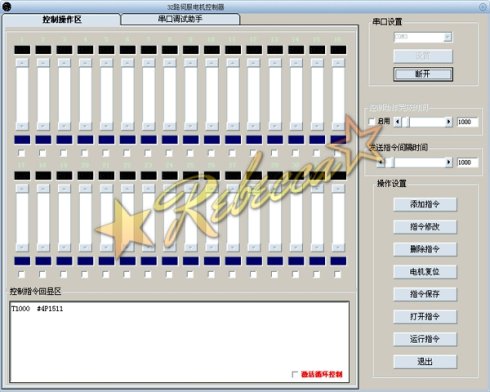
这是我看到的上位机界面。
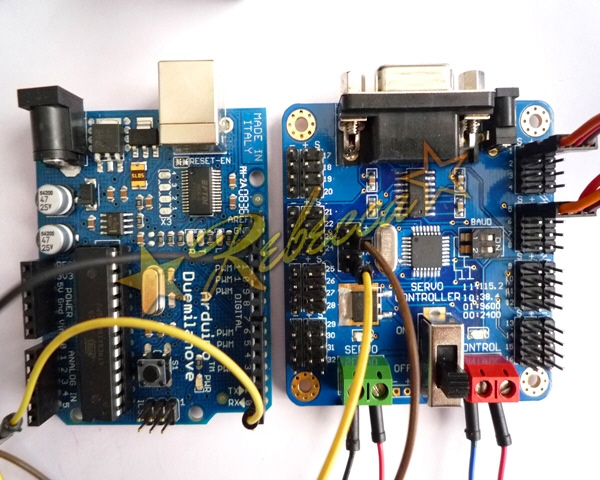
它与Arduino配合连接也很简单,接线如下图,只要将Arduino的TX与控制器的RX连接,再共地(GND)就OK了。

我的实物连线图
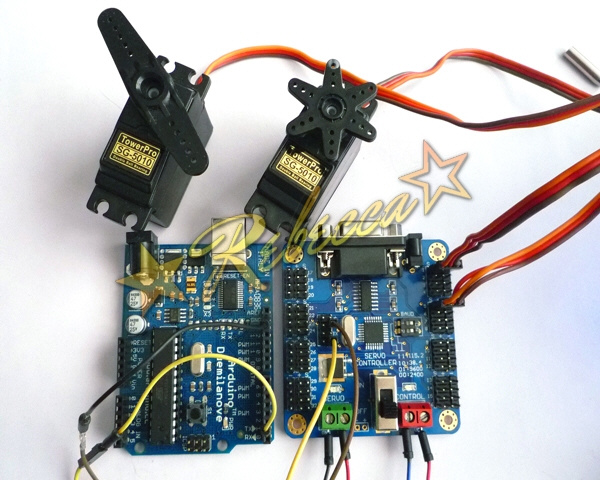
这里我先控制两个舵机,做个试验,当然你想控制几个都行,只要不超过限定数量,下面是

 大小: 8KB
大小: 8KB
 大小: 89.5M
大小: 89.5M
 终端仿真器 SecureCRTv7.1.1.264 最新版
终端仿真器 SecureCRTv7.1.1.264 最新版  串口调试小助手1.3 免费版
串口调试小助手1.3 免费版  WinHex 十六进制编辑器v20.2 SR-5 绿色中文注册版
WinHex 十六进制编辑器v20.2 SR-5 绿色中文注册版  小旋风ASP服务器安装版
小旋风ASP服务器安装版  16进制转换工具V1.0 中文绿色版
16进制转换工具V1.0 中文绿色版  Adobe AIRV33.1.1.932 官方最新版
Adobe AIRV33.1.1.932 官方最新版  github离线安装包64位版V2.9.11官方最新版(github desktop)
github离线安装包64位版V2.9.11官方最新版(github desktop)  mysql数据库.net开发驱动(mysql connector net )8.0.11 官方最新版
mysql数据库.net开发驱动(mysql connector net )8.0.11 官方最新版  MSDN Library Visual Studio 6.0(VC、VB、VF、VJ)中文版win32开发人员必备
MSDN Library Visual Studio 6.0(VC、VB、VF、VJ)中文版win32开发人员必备  版本控制软件(SourceTree)v3.4.6 官方最新版
版本控制软件(SourceTree)v3.4.6 官方最新版  Memory Analyzer (MAT)V1.01 免费绿色版
Memory Analyzer (MAT)V1.01 免费绿色版  Delphi Distillerv1.85绿色版
Delphi Distillerv1.85绿色版  IBM内存检测工具(IBM Thread and Monitor Dump Analyzer for Java)V4.3.3 绿色版
IBM内存检测工具(IBM Thread and Monitor Dump Analyzer for Java)V4.3.3 绿色版  .NETv3.0 可再发行组件包
.NETv3.0 可再发行组件包  一键安装JSP环境安装版
一键安装JSP环境安装版  slave4j(基于eclipse插件的java代码生成器)V1.0.0 正式版
slave4j(基于eclipse插件的java代码生成器)V1.0.0 正式版  Auto DebugProfessional 5.6.5.18 中文绿色版
Auto DebugProfessional 5.6.5.18 中文绿色版  Understand For C++V1.4.319英文安装版
Understand For C++V1.4.319英文安装版