
















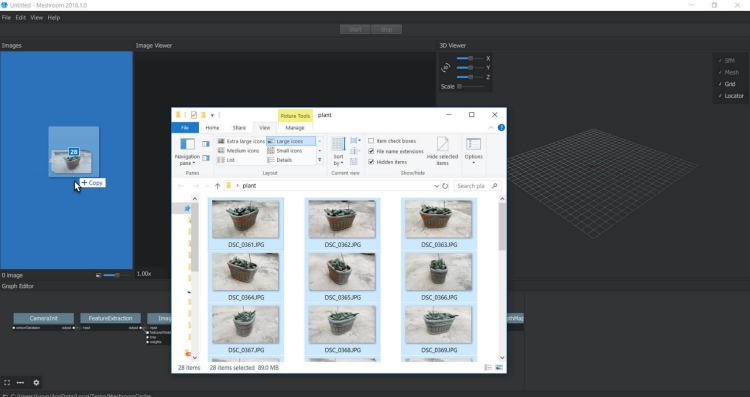
Meshroom是一款优秀的AliceVision 开发的一套3D 扫描软体,采用photogrammetry(摄影测量法)为基础释出的开源软体,广泛适用与世界各国各领域,有需要的小伙伴欢迎来西西下载体验。

安装说明:
首先,进入AliceVision官网找到Meshroom,点选下方的“Download Software”按钮

这时会跳到Github 的页面,选择自己需要的版本下载,Linux 系统选第一个,Windows 选择第二个;也可以直接在本站下载。

因为软体本身是免安装的,下载下来解压缩即可使用。

设置环境说明:
爱丽丝视界
Meshroom依赖于AliceVision框架。运行Meshroom时,AliceVision的二进制文件必须在路径中。要构建AliceVision,请遵循本指南。
Meshroom还依赖于AliceVision提供的特定文件。
传感器数据库:每个摄像机型号的传感器宽度的文本数据库。在AliceVision源代码树中提供:{ALICEVISION_ROOT}/src/aliceVision/sensorDB/cameraSensors.db
voctree(可选):对于较大的数据集(>200张图像),大大提高了图像匹配性能。可以在这里下载。
必须为Meshroom设置环境变量才能找到这些文件:
ALICEVISION_SENSOR_DB=/path/to/database
ALICEVISION_VOCTREE=/path/to/voctree
Python环境
Windows:Python3(>=3.5)
Linux:Python3(>=3.5)或Python2(>=2.7)
Windows没有Python2.7支持
官方Python2.7二进制包是使用VisualStudio2008构建的,而PySide2/Qt是使用VisualStudio2015/2017构建的。因此,为了避免混合MSVC运行时库,Qt不出货PySide2轮在Windows上的Python2.7(如解释在这里)。请注意,仅在命令行模式下(无UI)使用Meshroom,不需要PySide2,Python2.7很好。
要安装运行时,开发和打包的所有要求,只需运行:
点安装-rrequirements.txt-rdev_requirements.txt
注意:dev_requirements仅与测试和包装有关。运行Meshroom不是强制性的。
Qt插件
可以构建其他Qt插件来扩展MeshroomUI功能。尽管将来可能会更好地集成它们,但可以在单独的存储库中找到它们。请注意,它们是可选的,但强烈建议使用。
QmlAlembic
添加了对在Meshroom的3D视口中加载Alembic文件的支持。可以可视化稀疏的重建结果(点云和摄像机)。
QML2_IMPORT_PATH=/path/to/qmlAlembic/install/qml
QtOIIO
使用OpenImageIO作为后端在Qt中加载图像。允许在网格空间中可视化RAW/EXR图像。该插件还提供了QMLQt3D实体,以加载以EXR格式存储的深度图文件。
QT_PLUGIN_PATH=/path/to/QtOIIO/install
QML2_IMPORT_PATH=/path/to/QtOIIO/install/qml
更新日志:
支持原始图像文件。
可视化:新的可视化模块的特征提取。公关、新QtAliceVision
纹理:大大提高纹理质量。
纹理:添加对UDIM的支持。
纹理:速度的改进
网格化:导出Alembic中的密集点云。
网格化:导出完整的原始密集点云的新选项(所有3D点候选点在切割和过滤之前)。
网格化:添加了一个选项来导出每个顶点的颜色数据,网格化可以正确地保留颜色。
基于AliceVision 2.2.0。
 大小: 583.7M
大小: 583.7M
 大小: 1.84G
大小: 1.84G AutoCAD 2008 简体中文版(AutoCAD 2008)32位|64位
AutoCAD 2008 简体中文版(AutoCAD 2008)32位|64位  CAD字体大全1311款字体
CAD字体大全1311款字体  AutoCAD2013官方简体中文版
AutoCAD2013官方简体中文版  dwg版本转换工具(DWG TrueConvert)多语中文版
dwg版本转换工具(DWG TrueConvert)多语中文版  中国国家标准CAD图框模板
中国国家标准CAD图框模板  CAD图库大全DWG
CAD图库大全DWG  Autocad2013注册机绿色免费版
Autocad2013注册机绿色免费版  AutoCAD 2008注册机和破解文件
AutoCAD 2008注册机和破解文件  中望CAD2007免费标准版
中望CAD2007免费标准版  家装辅助设计软件(Sweet Home 3D)V6.6中文安装版
家装辅助设计软件(Sweet Home 3D)V6.6中文安装版  草图大师中文版7.1.4871 (SketchUp Pro)汉化破解版
草图大师中文版7.1.4871 (SketchUp Pro)汉化破解版  PROE3.0野火版免手动破解版
PROE3.0野火版免手动破解版  CAD迷你画图v2024R3 官方安装版
CAD迷你画图v2024R3 官方安装版  我家我设计V6.5绿色中文增强版
我家我设计V6.5绿色中文增强版